Python 量子運算(二九):兩極與赤道
2023/02/25
-----
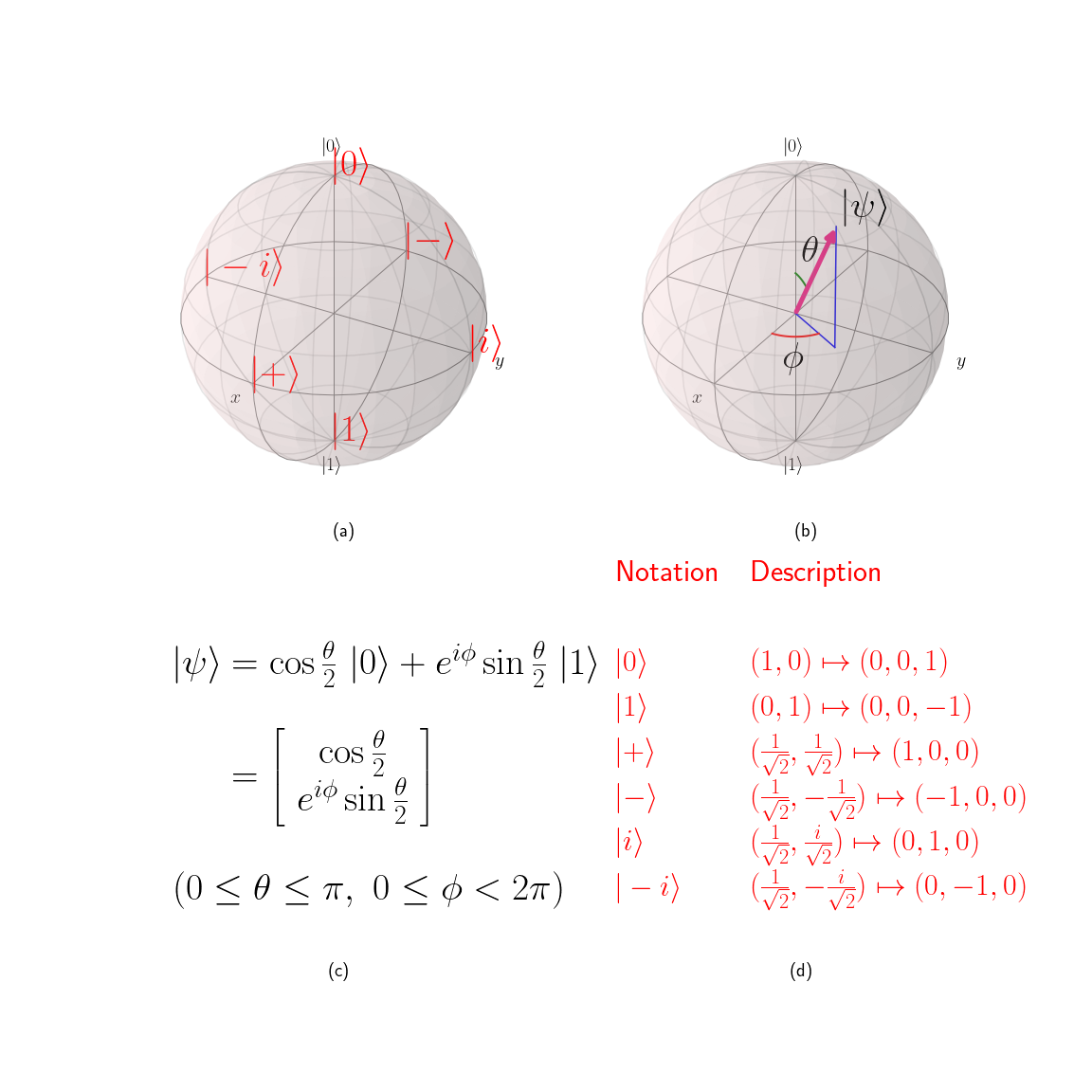
Fig. 29.1. Two poles and equator.
-----
代碼 29.1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 | # Program 29.1:Two poles and equator import numpy as np import matplotlib as mpl import matplotlib.pyplot as plt from qiskit.visualization import plot_bloch_vector class Point: def __init__(self, x, y, z): self.x = x self.y = y self.z = z def Line(ax, A, B): ax.plot([A.x, B.x], [A.y, B.y], [A.z, B.z], 'b') return def Subplot_1(): ax1 = fig.add_subplot(221, projection='3d') PO = Point(0, 0, 0) plot_bloch_vector([PO.x, PO.y, PO.z], ax=ax1) P1 = Point(0, 0, 1) P2 = Point(0, 0, -1) P3 = Point(0, -1, 0) P4 = Point(0, 1, 0) P5 = Point(1, 0, 0) P6 = Point(-1, 0, 0) ax1.text(P1.x, P1.y, P1.z, r'$\vert 0 \rangle$', color='r') ax1.text(P2.x, P2.y, P2.z, r'$\vert 1 \rangle$', color='r') ax1.text(P3.x, P3.y, P3.z, r'$\vert + \rangle$', color='r') ax1.text(P4.x, P4.y, P4.z, r'$\vert - \rangle$', color='r') ax1.text(P5.x, P5.y, P5.z, r'$\vert i \rangle$', color='r') ax1.text(P6.x, P6.y, P6.z, r'$\vert -i \rangle$', color='r') ax1.text(0, 0, -1.8, '(a)', fontsize=20) ax.set_axis_off() return def Subplot_2(): ax1 = fig.add_subplot(222, projection='3d') # P1 = Point(0, 0, 1) # plot_bloch_vector([P1.x, P1.y, P1.z], ax=ax1) # ax1.scatter(P1.x, P1.y, P1.z) # P2 = Point(0, 0, 0) # Line(ax1, P1, P2) theta = np.pi / 6 rotation = (3/2) * np.pi # transfer 3d to qiskit 3d phi_1 = np.pi / 3 # 3d phi_2 = rotation + phi_1 # qiskit 3d PO = Point(0, 0, 0) PB_1 = Point(np.sin(theta)*np.cos(phi_1), np.sin(theta)*np.sin(phi_1), 0) PB_2 = Point(np.sin(theta)*np.cos(phi_2), np.sin(theta)*np.sin(phi_2), 0) PA_1 = Point(PB_1.x, PB_1.y, np.cos(theta)) PA_2 = Point(PB_2.x, PB_2.y, np.cos(theta)) plot_bloch_vector([PA_1.x, PA_1.y, PA_1.z], ax=ax1) # qiskit 3d Line(ax1, PO, PB_2) # Line(ax1, PO, PA_2) Line(ax1, PA_2, PB_2) # lables(psi) ax1.text(0.35, 0, 0.8, r"$\vert\psi\rangle$") ax1.text(0.05, 0, 0.4, r"$\theta$") ax1.text(-0.1, 0, -0.45, r"$\phi$") # curves: theta and phi theta_max = np.pi / 6 # angle between psi and z axis phi_max = np.pi / 3 # angle between psi and x axis phi_offset = -np.pi / 2 # xy coordinate rotation from matplotlib to qiskit curve_radius = 0.3 n = 20 c1 = np.linspace(0, theta_max, n) x1 = curve_radius * np.sin(c1) * np.cos(phi_max+phi_offset) y1 = curve_radius * np.sin(c1) * np.sin(phi_max+phi_offset) z1 = curve_radius * np.cos(c1) ax1.plot(x1, y1, z1, 'g', lw=2) # curve theta c2 = np.linspace(phi_offset, phi_max+phi_offset, n) x2 = curve_radius * np.cos(c2) y2 = curve_radius * np.sin(c2) z2 = c2 * 0 ax1.plot(x2, y2, z2, 'r', lw=2) # curve phi ax1.text(0, 0, -1.8, '(b)', fontsize=20) ax.set_axis_off() return def Subplot_3(): ax = plt.subplot(223) # string setting s1_1 = r'$\vert\psi\rangle$' s1_2 = ( r'$=\cos\frac{\theta}{2}\ \vert0\rangle' r'+e^{i\phi}\sin\frac{\theta}{2}\ \vert1\rangle$' ) s2 = ( r'$=\begin{bmatrix}\cos\frac{\theta}{2}\\$' r'$\ e^{i\phi}\sin\frac{\theta}{2}\ \end{bmatrix}$' ) s3 = r'$(0\leq\theta\leq\pi,\ 0\leq\phi<2\pi)$' # string output ax.text(0.10, 0.75, s1_1) ax.text(0.25, 0.75, s1_2) ax.text(0.25, 0.45, s2) ax.text(0.10, 0.15, s3) ax.text(0.5, -0.055, '(c)', fontsize=20) ax.set_axis_off() return def Subplot_4(): ax = plt.subplot(224) # Notation nttn = ['Notation', '', r'$\vert 0 \rangle$', r'$\vert 1 \rangle$', r'$\vert + \rangle$', r'$\vert - \rangle$', r'$\vert i \rangle$', r'$\vert -i \rangle$', ] # Description dctn = ['Description', '', r'$(1,0) \mapsto (0,0,1)$', r'$(0,1) \mapsto (0,0,-1)$', r'$(\frac{1}{\sqrt 2},\frac{1}{\sqrt 2}) \mapsto (1,0,0)$', r'$(\frac{1}{\sqrt 2},-\frac{1}{\sqrt 2}) \mapsto (-1,0,0)$', r'$(\frac{1}{\sqrt 2},\frac{i}{\sqrt 2}) \mapsto (0,1,0)$', r'$(\frac{1}{\sqrt 2},-\frac{i}{\sqrt 2}) \mapsto (0,-1,0)$', ] for i in range(8): ax.text(0.05, 1-0.12*i, nttn[i], color='r', fontsize=32) ax.text(0.40, 1-0.12*i, dctn[i], color='r', fontsize=32) ax.text(0.5, -0.055, '(d)', fontsize=20) ax.set_axis_off() return # figure setting mpl.rcParams['text.usetex'] = True mpl.rcParams['text.latex.preamble'] = r'\usepackage{{amsmath}}' mpl.rcParams['font.size'] = 40 fig, ax = plt.subplots(figsize=(16, 16)) Subplot_1() Subplot_2() Subplot_3() Subplot_4() # plt.savefig('/content/drive/My Drive/pqc/0029_001.png', facecolor='w') plt.show() |
解說:
-----
References
-----
Python 量子運算(目錄)
https://mandhistory.blogspot.com/2022/01/quantum-computing.html
-----
沒有留言:
張貼留言
注意:只有此網誌的成員可以留言。